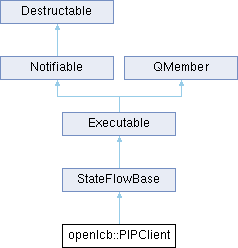
State flow to request PIP information from a remote node on the OpenLCB network.
More...
|
| template<class T , typename... Args> |
| static void | invoke_subflow_and_ignore_result (FlowInterface< Buffer< T > > *target_flow, Args &&... args) |
| | Calls a helper flow to perform some actions.
|
| |
| typedef Action(StateFlowBase::* | Callback) () |
| | State Flow callback prototype.
|
| |
| | StateFlowBase (Service *service) |
| | Constructor.
|
| |
| | ~StateFlowBase () |
| | Destructor.
|
| |
| void | reset_flow (Callback c) |
| | Resets the flow to the specified state.
|
| |
| bool | is_state (Callback c) |
| |
| bool | is_terminated () |
| |
| void | start_flow (Callback c) |
| | Resets the flow to the specified state and starts it.
|
| |
| Action | again () |
| | Call the current state again via call_immediately.
|
| |
| Action | exit () |
| | Terminate current StateFlow activity.
|
| |
| Action | delete_this () |
| | Terminates the flow and deletes *this.
|
| |
| Action | set_terminated () |
| | Sets the flow to terminated state.
|
| |
| Action | call_immediately (Callback c) |
| | Imediately call the next state upon return.
|
| |
| Action | wait () |
| | Wait for an asynchronous call.
|
| |
| Action | wait_and_call (Callback c) |
| | Wait for resource to become available before proceeding to next state.
|
| |
| template<class T > |
| Action | allocate_and_call (FlowInterface< Buffer< T > > *target_flow, Callback c, Pool *pool=nullptr) |
| | Allocates a buffer from a pool and proceed to the next state when allocation is successful.
|
| |
| Action | allocate_and_call (Callback c, QAsync *queue) |
| | Allocates an entry from an asynchronous queue, and transitions to a state once the allocation is complete.
|
| |
| template<class T > |
| Buffer< T > * | full_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| | Takes the result of the asynchronous allocation without resetting the object.
|
| |
| template<class T > |
| T * | full_allocation_result (TypedQAsync< T > *queue) |
| | Takes the result of the asynchronous allocation without resetting the object.
|
| |
| template<class T > |
| void | cast_allocation_result (T **member) |
| | Takes the result of the asynchronous allocation without resetting the object.
|
| |
| template<class T > |
| Buffer< T > * | get_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| | Takes the result of the asynchronous allocation.
|
| |
| Action | yield_and_call (Callback c) |
| | Place the current flow to the back of the executor, and transition to a new state after we get the CPU again.
|
| |
| Action | yield () |
| | Place the current flow to the back of the executor, and re-try the current state after we get the CPU again.
|
| |
| Action | sleep_and_call (::Timer *timer, long long timeout_nsec, Callback c) |
| | Suspends execution of this control flow for a specified time.
|
| |
| template<class T , typename... Args> |
| Action | invoke_subflow_and_wait (FlowInterface< Buffer< T > > *target_flow, Callback c, Args &&... args) |
| | Calls a helper flow to perform some actions.
|
| |
| Action | read_repeated (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| | Blocks until size bytes are read and then invokes the next state.
|
| |
| Action | read_single (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| | Attempts to read at most size_t bytes, and blocks the caller until at least one byte is read.
|
| |
| Action | read_nonblocking (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| | Attempts to read at most size bytes, and then invokes the next state, even if only zero bytes are available right now.
|
| |
| Action | read_repeated_with_timeout (StateFlowTimedSelectHelper *helper, long long timeout_nsec, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| | Blocks until size bytes are read, or a timeout expires.
|
| |
| Action | internal_try_read () |
| | Implementation state that gets repeatedly called upon every wakeup and tries to make progress on reading.
|
| |
| Action | write_repeated (StateFlowSelectHelper *helper, int fd, const void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| | Writes some data into a file descriptor, repeating the operation as necessary until all bytes are written.
|
| |
| Action | internal_try_write () |
| | Implementation state that gets repeatedly called upon every wakeup and tries to make progress on writing.
|
| |
| | QMember () |
| | Constructor.
|
| |
| | ~QMember () |
| | Destructor.
|
| |
| QMember * | next |
| | pointer to the next member in the queue
|
| |
State flow to request PIP information from a remote node on the OpenLCB network.
Usage:
Create a global or local instance of this flow. Call the request() function with the arguments, supplying as notifiable the calling flow or a sync notifiable for blocking operation on a thread. Wait for the notification. Check that error_code() == OPEATION_SUCCESS, then access the returned protocol bitmask via the response() accessor.
Definition at line 61 of file PIPClient.hxx.
 Public Member Functions inherited from StateFlowBase
Public Member Functions inherited from StateFlowBase