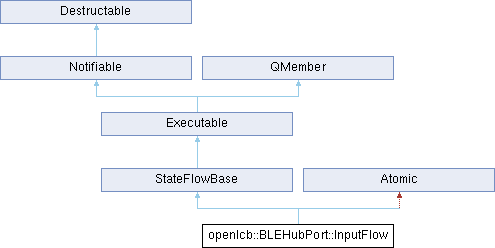
State flow that handles data arriving from this bluetooth connection. More...
#include <BLEHubPort.hxx>
Public Member Functions | |
| InputFlow (BLEHubPort *parent, DirectHubInterface< uint8_t[]> *hub, std::unique_ptr< MessageSegmenter > segmenter) | |
| void | input_data (const uint8_t *data, size_t len) |
| Called by the BLE stack when input data arrives from this remote endpoint. | |
| Action | take_input () |
| Moves over data from the other thread which is in the transferBuf_. | |
| Action | segment_head () |
| Takes the head of segmentBuf_, and performs the message segmentation on it. | |
| Action | send_output () |
| Called when one full message is segmented into outputBuf_. | |
| Action | send_callback () |
| This is the callback state that is invoked inline by the hub. | |
| Action | send_done () |
 Public Member Functions inherited from StateFlowBase Public Member Functions inherited from StateFlowBase | |
| void | run () override |
| Callback from the executor. | |
| void | notify () override |
| Wakeup call arrived. | |
| Service * | service () |
| Return a pointer to the service I am bound to. | |
| Public Member Functions inherited from Executable | |
| void | test_deletion () |
| Public Member Functions inherited from QMember | |
| void | init () |
| Initiailize a QMember, in place of a public placement construction. | |
Private Attributes | |
| BLEHubPort * | parent_ |
| Owning outside flow. | |
| bool | flowWaiting_ |
| True if the flow is paused and waiting for more data to arrive. | |
| uint8_t | inlineCall_: 1 |
| 1 if we got the send callback inline from the read_done. | |
| uint8_t | sendComplete_: 1 |
| 1 if the run callback actually happened inline. | |
| LinkedDataBufferPtr | appendBuf_ |
| Current buffer for the input data. Owned by the input thread. | |
| LinkedDataBufferPtr | transferBuf_ |
| Buffer for transferring data rfrom the input thread to the service thread. | |
| LinkedDataBufferPtr | segmentBuf_ |
| Buffer for the data being segmented. | |
| LinkedDataBufferPtr | outputBuf_ |
| Buffer for one sent message. This is the output of the segmenter. | |
| std::unique_ptr< MessageSegmenter > | segmenter_ |
| Implementation (and state) of the business logic that segments incoming bytes into messages that shall be given to the hub. | |
| DirectHubInterface< uint8_t[]> * | hub_ |
| Parent hub where output data is coming from. | |
Friends | |
| class | BLEHubPort |
Additional Inherited Members | |
| Static Public Member Functions inherited from StateFlowBase | |
| template<class T , typename... Args> | |
| static void | invoke_subflow_and_ignore_result (FlowInterface< Buffer< T > > *target_flow, Args &&... args) |
| Calls a helper flow to perform some actions. | |
| Protected Types inherited from StateFlowBase | |
| typedef Action(StateFlowBase::* | Callback) () |
| State Flow callback prototype. | |
| Protected Member Functions inherited from StateFlowBase | |
| StateFlowBase (Service *service) | |
| Constructor. | |
| ~StateFlowBase () | |
| Destructor. | |
| void | reset_flow (Callback c) |
| Resets the flow to the specified state. | |
| bool | is_state (Callback c) |
| bool | is_terminated () |
| void | start_flow (Callback c) |
| Resets the flow to the specified state and starts it. | |
| Action | again () |
| Call the current state again via call_immediately. | |
| Action | exit () |
| Terminate current StateFlow activity. | |
| Action | delete_this () |
| Terminates the flow and deletes *this. | |
| Action | set_terminated () |
| Sets the flow to terminated state. | |
| Action | call_immediately (Callback c) |
| Imediately call the next state upon return. | |
| Action | wait () |
| Wait for an asynchronous call. | |
| Action | wait_and_call (Callback c) |
| Wait for resource to become available before proceeding to next state. | |
| template<class T > | |
| Action | allocate_and_call (FlowInterface< Buffer< T > > *target_flow, Callback c, Pool *pool=nullptr) |
| Allocates a buffer from a pool and proceed to the next state when allocation is successful. | |
| Action | allocate_and_call (Callback c, QAsync *queue) |
| Allocates an entry from an asynchronous queue, and transitions to a state once the allocation is complete. | |
| template<class T > | |
| Buffer< T > * | full_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| T * | full_allocation_result (TypedQAsync< T > *queue) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| void | cast_allocation_result (T **member) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| Buffer< T > * | get_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| Takes the result of the asynchronous allocation. | |
| Action | yield_and_call (Callback c) |
| Place the current flow to the back of the executor, and transition to a new state after we get the CPU again. | |
| Action | yield () |
| Place the current flow to the back of the executor, and re-try the current state after we get the CPU again. | |
| Action | sleep_and_call (::Timer *timer, long long timeout_nsec, Callback c) |
| Suspends execution of this control flow for a specified time. | |
| template<class T , typename... Args> | |
| Action | invoke_subflow_and_wait (FlowInterface< Buffer< T > > *target_flow, Callback c, Args &&... args) |
| Calls a helper flow to perform some actions. | |
| Action | read_repeated (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Blocks until size bytes are read and then invokes the next state. | |
| Action | read_single (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Attempts to read at most size_t bytes, and blocks the caller until at least one byte is read. | |
| Action | read_nonblocking (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Attempts to read at most size bytes, and then invokes the next state, even if only zero bytes are available right now. | |
| Action | read_repeated_with_timeout (StateFlowTimedSelectHelper *helper, long long timeout_nsec, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Blocks until size bytes are read, or a timeout expires. | |
| Action | internal_try_read () |
| Implementation state that gets repeatedly called upon every wakeup and tries to make progress on reading. | |
| Action | write_repeated (StateFlowSelectHelper *helper, int fd, const void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Writes some data into a file descriptor, repeating the operation as necessary until all bytes are written. | |
| Action | internal_try_write () |
| Implementation state that gets repeatedly called upon every wakeup and tries to make progress on writing. | |
| Protected Member Functions inherited from QMember | |
| QMember () | |
| Constructor. | |
| ~QMember () | |
| Destructor. | |
| Protected Attributes inherited from QMember | |
| QMember * | next |
| pointer to the next member in the queue | |
| Private Member Functions inherited from Atomic | |
| void | lock () |
| void | unlock () |
Detailed Description
State flow that handles data arriving from this bluetooth connection.
Definition at line 320 of file BLEHubPort.hxx.
Constructor & Destructor Documentation
◆ InputFlow()
|
inline |
Definition at line 323 of file BLEHubPort.hxx.
Member Function Documentation
◆ input_data()
|
inline |
Called by the BLE stack when input data arrives from this remote endpoint.
- Parameters
-
data payload that arrived. The data will be copied inline, and does not need to exist beyond when this function returns. len number of bytes in the data payload.
Definition at line 342 of file BLEHubPort.hxx.
◆ segment_head()
|
inline |
Takes the head of segmentBuf_, and performs the message segmentation on it.
Puts the resulting byte offsets into the outputBuf_.
Definition at line 388 of file BLEHubPort.hxx.
◆ send_callback()
|
inline |
This is the callback state that is invoked inline by the hub.
Since the hub invokes this->run(), a standard StateFlow will execute whatever state is current. We have set STATE(send_callback) as the current state above, hence the code continues in this function.
- Todo:
- do we need to add barriernotifiables here?
Definition at line 440 of file BLEHubPort.hxx.
◆ send_done()
|
inline |
Definition at line 466 of file BLEHubPort.hxx.
◆ send_output()
|
inline |
Called when one full message is segmented into outputBuf_.
Sends this to the hub.
Definition at line 420 of file BLEHubPort.hxx.
◆ take_input()
|
inline |
Moves over data from the other thread which is in the transferBuf_.
Continues on to segment and send them as messages to the hub.
Definition at line 378 of file BLEHubPort.hxx.
Friends And Related Symbol Documentation
◆ BLEHubPort
|
friend |
Definition at line 473 of file BLEHubPort.hxx.
Member Data Documentation
◆ appendBuf_
|
private |
Current buffer for the input data. Owned by the input thread.
Definition at line 487 of file BLEHubPort.hxx.
◆ flowWaiting_
|
private |
True if the flow is paused and waiting for more data to arrive.
Guarded by atomic *this.
Definition at line 480 of file BLEHubPort.hxx.
◆ hub_
|
private |
Parent hub where output data is coming from.
Definition at line 500 of file BLEHubPort.hxx.
◆ inlineCall_
|
private |
1 if we got the send callback inline from the read_done.
Definition at line 482 of file BLEHubPort.hxx.
◆ outputBuf_
|
private |
Buffer for one sent message. This is the output of the segmenter.
Definition at line 495 of file BLEHubPort.hxx.
◆ parent_
|
private |
Owning outside flow.
Definition at line 476 of file BLEHubPort.hxx.
◆ segmentBuf_
|
private |
Buffer for the data being segmented.
Owned by (only manipulated on) the Service executor.
Definition at line 493 of file BLEHubPort.hxx.
◆ segmenter_
|
private |
Implementation (and state) of the business logic that segments incoming bytes into messages that shall be given to the hub.
Definition at line 498 of file BLEHubPort.hxx.
◆ sendComplete_
|
private |
1 if the run callback actually happened inline.
Definition at line 484 of file BLEHubPort.hxx.
◆ transferBuf_
|
private |
Buffer for transferring data rfrom the input thread to the service thread.
Guarded by atomic *this.
Definition at line 490 of file BLEHubPort.hxx.
The documentation for this class was generated from the following file: