#include <BusMaster.hxx>
Public Member Functions | |
| Master (Service *s, PacketSink *sink, Activity *idle, unsigned num_enqueued) | |
| Constructor. | |
| void | set_policy (unsigned num_prio, const Fixed16 *strides) |
| Sets the scheduling policy. | |
| void | schedule_activity (Activity *a, unsigned prio) |
| Adds an activity to the bus master's scheduler. | |
 Public Member Functions inherited from StateFlowBase Public Member Functions inherited from StateFlowBase | |
| void | run () override |
| Callback from the executor. | |
| void | notify () override |
| Wakeup call arrived. | |
| Service * | service () |
| Return a pointer to the service I am bound to. | |
| Public Member Functions inherited from Executable | |
| void | test_deletion () |
| Public Member Functions inherited from QMember | |
| void | init () |
| Initiailize a QMember, in place of a public placement construction. | |
Private Member Functions | |
| Action | get_buffer () |
| Start of scheduling flow. | |
| Action | fill_pkt () |
| Executes the scheduling decision, fills in the packet by the selected activity and sends it to the bus sink. | |
Private Attributes | |
| uninitialized< ScheduledQueue > | queue_ |
| Handles the policy of polling. | |
| Activity * | idle_ |
| If we have no activity to do, this activity gets invoked. | |
| PacketSink * | sink_ |
| Where to send the generated packets. | |
| LimitedPool | pool_ |
| Source of the buffers that we fill and hand out. | |
| uint16_t | numPacketsInPool_ |
| Total number of packets that the pool can generate. | |
| uint16_t | needShutdown_: 1 |
| True if shutdown was requested. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from StateFlowBase | |
| template<class T , typename... Args> | |
| static void | invoke_subflow_and_ignore_result (FlowInterface< Buffer< T > > *target_flow, Args &&... args) |
| Calls a helper flow to perform some actions. | |
| Protected Types inherited from StateFlowBase | |
| typedef Action(StateFlowBase::* | Callback) () |
| State Flow callback prototype. | |
| Protected Member Functions inherited from StateFlowBase | |
| StateFlowBase (Service *service) | |
| Constructor. | |
| ~StateFlowBase () | |
| Destructor. | |
| void | reset_flow (Callback c) |
| Resets the flow to the specified state. | |
| bool | is_state (Callback c) |
| bool | is_terminated () |
| void | start_flow (Callback c) |
| Resets the flow to the specified state and starts it. | |
| Action | again () |
| Call the current state again via call_immediately. | |
| Action | exit () |
| Terminate current StateFlow activity. | |
| Action | delete_this () |
| Terminates the flow and deletes *this. | |
| Action | set_terminated () |
| Sets the flow to terminated state. | |
| Action | call_immediately (Callback c) |
| Imediately call the next state upon return. | |
| Action | wait () |
| Wait for an asynchronous call. | |
| Action | wait_and_call (Callback c) |
| Wait for resource to become available before proceeding to next state. | |
| template<class T > | |
| Action | allocate_and_call (FlowInterface< Buffer< T > > *target_flow, Callback c, Pool *pool=nullptr) |
| Allocates a buffer from a pool and proceed to the next state when allocation is successful. | |
| Action | allocate_and_call (Callback c, QAsync *queue) |
| Allocates an entry from an asynchronous queue, and transitions to a state once the allocation is complete. | |
| template<class T > | |
| Buffer< T > * | full_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| T * | full_allocation_result (TypedQAsync< T > *queue) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| void | cast_allocation_result (T **member) |
| Takes the result of the asynchronous allocation without resetting the object. | |
| template<class T > | |
| Buffer< T > * | get_allocation_result (FlowInterface< Buffer< T > > *target_flow) |
| Takes the result of the asynchronous allocation. | |
| Action | yield_and_call (Callback c) |
| Place the current flow to the back of the executor, and transition to a new state after we get the CPU again. | |
| Action | yield () |
| Place the current flow to the back of the executor, and re-try the current state after we get the CPU again. | |
| Action | sleep_and_call (::Timer *timer, long long timeout_nsec, Callback c) |
| Suspends execution of this control flow for a specified time. | |
| template<class T , typename... Args> | |
| Action | invoke_subflow_and_wait (FlowInterface< Buffer< T > > *target_flow, Callback c, Args &&... args) |
| Calls a helper flow to perform some actions. | |
| Action | read_repeated (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Blocks until size bytes are read and then invokes the next state. | |
| Action | read_single (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Attempts to read at most size_t bytes, and blocks the caller until at least one byte is read. | |
| Action | read_nonblocking (StateFlowSelectHelper *helper, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Attempts to read at most size bytes, and then invokes the next state, even if only zero bytes are available right now. | |
| Action | read_repeated_with_timeout (StateFlowTimedSelectHelper *helper, long long timeout_nsec, int fd, void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Blocks until size bytes are read, or a timeout expires. | |
| Action | internal_try_read () |
| Implementation state that gets repeatedly called upon every wakeup and tries to make progress on reading. | |
| Action | write_repeated (StateFlowSelectHelper *helper, int fd, const void *buf, size_t size, Callback c, unsigned priority=Selectable::MAX_PRIO) |
| Writes some data into a file descriptor, repeating the operation as necessary until all bytes are written. | |
| Action | internal_try_write () |
| Implementation state that gets repeatedly called upon every wakeup and tries to make progress on writing. | |
| Protected Member Functions inherited from QMember | |
| QMember () | |
| Constructor. | |
| ~QMember () | |
| Destructor. | |
| Protected Attributes inherited from QMember | |
| QMember * | next |
| pointer to the next member in the queue | |
Detailed Description
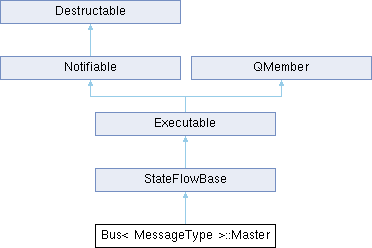
class Bus< MessageType >::Master
This keeps the scheduler of activities and owns a variety of auxiliary objects and memory management.
Definition at line 74 of file BusMaster.hxx.
Constructor & Destructor Documentation
◆ Master()
|
inline |
Constructor.
- Parameters
-
s the executor to run the service on. sink this is where the generated packets will be sent out. idle when no activity is scheduled, this activity will be invoked with the packet. This activity must be ready to render a packet at all times. num_enqueued this is how many packets we fill in and enqueue for the sink. It is a tradeoff between the sink being out of work vs the what is the lowest latency between enqueueing a high priority activity and that getting the next packet. Recommended values are 2 or 3.
Definition at line 88 of file BusMaster.hxx.
Member Function Documentation
◆ fill_pkt()
Executes the scheduling decision, fills in the packet by the selected activity and sends it to the bus sink.
Definition at line 143 of file BusMaster.hxx.
◆ get_buffer()
Start of scheduling flow.
Definition at line 136 of file BusMaster.hxx.
◆ schedule_activity()
|
inline |
Adds an activity to the bus master's scheduler.
The activity must be ready to fill in a packet right now.
- Parameters
-
a the activity to schedule. The caller retains ownership. prio the priority band to schedule in.
Definition at line 129 of file BusMaster.hxx.
◆ set_policy()
|
inline |
Sets the scheduling policy.
This must be called exactly once after construction before scheduling any bus activity.
Definition at line 119 of file BusMaster.hxx.
Member Data Documentation
◆ idle_
If we have no activity to do, this activity gets invoked.
It must always be able to fill in a packet.
Definition at line 165 of file BusMaster.hxx.
◆ needShutdown_
|
private |
True if shutdown was requested.
Definition at line 173 of file BusMaster.hxx.
◆ numPacketsInPool_
|
private |
Total number of packets that the pool can generate.
Definition at line 171 of file BusMaster.hxx.
◆ pool_
|
private |
Source of the buffers that we fill and hand out.
Definition at line 169 of file BusMaster.hxx.
◆ queue_
|
private |
Handles the policy of polling.
Definition at line 162 of file BusMaster.hxx.
◆ sink_
|
private |
Where to send the generated packets.
Definition at line 167 of file BusMaster.hxx.
The documentation for this class was generated from the following file: